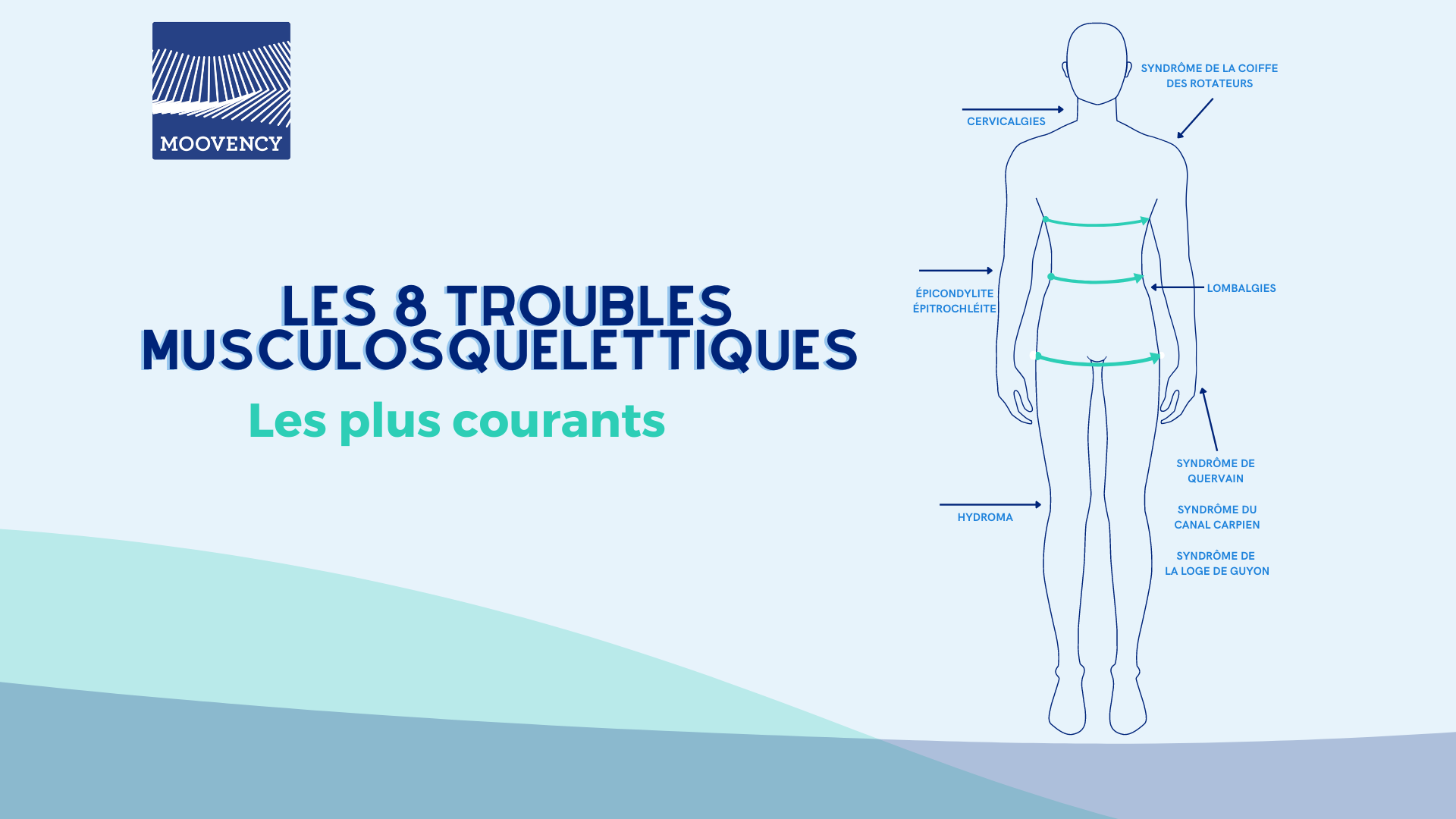
Nous le savons : détecter les risques de TMS n’est pas facile. Maladies plurifactorielles, les TMS ne sont jamais dues à une cause unique. Et l’analyse des risques biomécaniques est une étape importante dans la démarche de prévention. Mais la complexité de cette tâche peut rapidement devenir décourageante… Tout le monde n’est pas un expert dans ce domaine.
Et pour bien analyser les risques d’ordre biomécanique, et bien les prévenir… Il faut bien les mesurer. Oui, mais comment ? Avec un outil de mesure biomécanique, pardi !
Pour rendre les choses plus claires pour vous, nous avons comparé différentes solutions de cotation. On y va ?
Sommaire de l'article
L’EMG ou électromyogramme (de surface), outil populaire de la mesure de l’effort musculaire
Le MMG ou la Mécanomyographie : des vibrations pour étudier le mouvement
La modélisation mathématique : la science au service des mesures biomécaniques
La mesure des postures et du mouvement des opérateurs
Les capteurs portés pour mesurer la biomécanique : l’exemple des goniomètres
Capteurs portés : zoom sur les systèmes magnétiques
Capteurs portés pour les mesures des sollicitations biomécaniques : les systèmes inertiels
L’optique pour mesurer les contraintes biomécaniques : les systèmes optoélectroniques passés à la loupe
Optique : les caméras 2D et la vision par ordinateur, combo efficace pour mesurer les risques de TMS
Optique : des caméras 3D et de la vision par ordinateur comme méthode de cotation des risques professionnels
Bilan : quel est l’outil de mesure le plus adapté ?
Concernant les capteurs
Concernant les systèmes basés sur la vision
Le point de vue de Moovency sur le bon outil de cotation biomécanique
La biomécanique, porte d’entrée pour l’analyse des risques de TMS
Si vous êtes ici, c’est peut-être parce que vous souhaitez mettre en place une démarche de prévention des TMS. Ou peut-être parce que vous devez optimiser celle que vous avez déjà.
Et c’est une bonne chose.
Si vous désirez garder vos employés en sécurité et en bonne santé, la prévention des TMS sera votre alliée. Et si vous voulez éviter tous les frais liés aux TMS dans votre structure – coûts directs, indirects, mais aussi intangibles – elle sera même votre meilleure amie !
De l’intérêt de s’équiper d’un outil de mesure biomécanique pour les entreprises
Nous l’avons dit plus tôt : les TMS sont des pathologies multifactorielles. Ici, nous allons nous attaquer à l’un des facteurs les plus chronophages à quantifier et qualifier : la biomécanique.
Répétitivité des gestes, efforts excessifs, gestes fins et précis, durées des postures inconfortables : nombreux sont les facteurs de risques biomécaniques. En étudiant la façon dont le corps se déplace et interagit avec son environnement, la biomécanique peut aider à identifier les facteurs de risque potentiel et à développer des stratégies pour les réduire.
Et en s’équipant d’un outil de mesure biomécanique, les entreprises économiseront un temps précieux dans leur prévention des TMS. Elles pourront se concentrer davantage sur les autres facteurs de risques, tels que les facteurs organisationnels ou psychosociaux.



La mesure de la force et de l’effort
L’EMG ou électromyogramme (de surface), outil populaire de la mesure de l’effort musculaire
L’EMG est l’instrument de mesure le plus répandu pour mesurer les efforts musculaires. Il est souvent de surface, composé de deux électrodes que l’on colle sur la peau. Il mesure l’activité électrique du muscle situé en dessous, afin d’obtenir de manière indirecte l’effort globale de ce dernier lors d’une contraction.
Avantages
✅ L’EMG est considéré comme l’outil de référence de la mesure de l’effort musculaire à l’heure actuelle en laboratoire.
Limites
❌ L’EMG demande une certaine expertise, car il nécessite un placement anatomique très précis.
❌ La mise en place est contraignante pour la production puisqu’il faut positionner les électrodes sur le corps de l’opérateur. Et donc l’interrompre dans l’exécution de son travail.
❌ Les résultats sont difficilement interprétables directement en termes de TMS. Il n’y a pas de norme directe qui lie l’activité électrique mesurée sur un muscle à un risque de TMS.
LE MMG ou la Mécanomyographie : des vibrations pour étudier le mouvement
Le MMG est un outil qui permet de mesurer l’activité vibratoire du muscle lors d’une contraction. Comme pour l’activité électrique avec l’EMG, l’activité vibratoire permet d’obtenir de manière indirecte l’effort global du muscle lors d’une contraction.
Avantages
✅ Le MMG est moins dépendant du placement sur le muscle que l’EMG.
✅ Il détecte plus facilement l’activité profonde du muscle.
Limites
❌ Comme l’EMG, la mise en place des capteurs sur le corps est contraignante.
❌ L’interprétation des risques est difficile. Les mesures restent de l’évaluation relative.
❌ Il manque à ce jour des études scientifiques permettant une démocratisation de son usage, notamment dans le domaine de l’ergonomie.
Les dynamomètres, pour des mesures biomécaniques de bout en bout
Les dynamomètres sont des outils qui permettent de mesurer les forces exercées ou subies par un individu, souvent aux extrémités – tels que les mains ou les pieds. Parmi les plus utilisés, nous pouvons citer les plateformes de force, les nappes de pression ou encore les capteurs de force.
Avantages
✅ Les dynamomètres offrent des mesures directes ou quasi directes des forces.
✅ Il existe des normes en ergonomie qui permettent de se comparer à des standards.
Limites
❌ Les mesures des dynamomètres sont très localisées aux extrémités du corps.
❌ Ils ne retranscrivent pas l’intensité de l’effort aux articulations et aux muscles. Il est donc difficile de mesurer les contraintes musculaires pouvant déboucher sur un risque de TMS.
La modélisation mathématique : la science au service des mesures biomécaniques
L’utilisation d’outils de modélisation biomécanique ou musculosquelettique permet d’estimer indirectement la force exercée sur les articulations et les muscles. Ils utilisent des modèles mathématiques à partir du mouvement ou encore des forces externes appliquées à l’opérateur.
Pour illustrer nos propos, prenons l’exemple d’un cycliste. Avec la modélisation mathématique, il est possible d’estimer indirectement les forces de chaque muscle des membres inférieurs à partir de la mesure de son mouvement et de la force qu’il exerce sur son pédalier.
Avantages
✅ La modélisation mathématique permet une estimation au niveau des muscles profonds des opérateurs.
✅ Elle est réalisable sans système de mesure du mouvement porté sur le corps.
Limites
❌ La modélisation mathématique est un outil complexe, limité à la recherche pour le moment.
❌ Le temps de calcul est important (plusieurs heures de calcul par minute de mesure).
❌ Elle est très dépendante du bruit de mesure des données de mouvement.
❌ Les résultats sont difficilement interprétables directement en termes de risque de TMS.
❌ Il n’y a pas de norme. L’évaluation se limite pour le moment à la comparaison d’une situation à une autre.
Comment bien choisir son outil de mesures biomécaniques ?
Vous ne savez pas comment choisir votre outil de quantification des risques biomécaniques ? Moovency a concocté un guide pour vous aider à choisir l’outil adapté à vos enjeux.

La mesure des postures et du mouvement des opérateurs
Il existe deux sous-familles dans les outils d’analyse du mouvement :
- les capteurs portés sur le corps ;
- et les systèmes basés sur l’optique, c’est-à-dire la mesure via une ou plusieurs caméras.
Les capteurs portés pour mesurer la biomécanique : l’exemple des goniomètres
Les goniomètres sont constitués de deux branches reliées à un potentiomètre ou à une jauge de contrainte permettant de mesurer une variation d’angle entre les deux branches.
Pour effectuer la mesure, il faut placer les deux branches sur les deux parties du corps reliées par l’articulation à mesurer. Ils montrent notamment les amplitudes articulaires des opérateurs.
Avantages
✅ C‘est une technologie robuste sans problème d’occultation.
Limites
❌ Il faut placer les capteurs sur le corps, ce qui peut gêner dans le mouvement des opérateurs. Cela peut limiter l’aspect « réel » du travail réalisé par les opérateurs et fausser les résultats.
❌ Elles ne mesurent que l’angle des articulations. Les positions ne sont pas comprises.
❌ Il y a souvent 2 axes de rotation. Et cela se limite aux articulations telles que les poignets.
Capteurs portés : zoom sur les systèmes magnétiques
Les systèmes magnétiques utilisent des capteurs placés sur le corps des opérateurs. Ils mesurent le champ magnétique généré par une source émettrice. Ce système permet d’obtenir la position et l’orientation de chaque capteur.
Avantages
✅ Avec les systèmes magnétiques, il n’y a pas d’erreur de dérive au cours du temps.
✅ Il n’y a pas, non plus, de problème d’occultation comme dans les systèmes optiques
✅ Ils offrent des positions et des orientations sans une phase de post-traitement.
Limites
❌ Il faut placer des capteurs sur le corps des opérateurs, à l’instar des goniomètres. Les limites sont les mêmes, l’opérateur est à nouveau entravé.
❌ Ils sont sensibles aux interférences électriques et magnétiques, ce qui peut poser problème pour les entreprises en environnement industriel, puisque la présence de métal est importante.
Capteurs portés pour les mesures des sollicitations biomécaniques : les systèmes inertiels
Les centrales inertielles ou encore IMU (Inertial Measurement Unit), sont des systèmes composés de capteurs intégrant un accéléromètre, un gyroscope et le plus souvent un magnétomètre. Chaque capteur permet d’obtenir les orientations du segment corporel sur lequel il est attaché.
Avantages
✅ Les systèmes inertiels n’ont pas de problème d’occultation.
✅ La technologie est peu chère.
✅ La taille des centrales inertielles est peu imposante.
Limites
❌ Cela reste des capteurs à placer sur le corps et donc ils peuvent gêner l’opérateur et contraindre la production
❌ On note des erreurs de dérive au cours du temps. Le gyroscope va se dérégler au fur et à mesure de l’utilisation. Même si le magnétomètre est là pour corriger ces dérives, ce dernier va être sensible aux interférences magnétiques et électriques. Nous retrouvons ici la même problématique que les systèmes magnétiques en condition industrielle
❌ Les systèmes inertiels ne mesurent que des orientations et ne permettent pas d’avoir les positions.
❌ Il est nécessaire de réaliser une calibration contraignante pour obtenir les positions.
Système basé sur l’optique pour mesurer les contraintes biomécaniques : les systèmes optoélectroniques passés à la loupe
Les systèmes opto-électroniques utilisent plusieurs caméras infrarouges pour reconstruire la position 3D de marqueurs réfléchissant (passifs) ou émettant (actifs) de la lumière infrarouge.
Ce sont ces systèmes qui sont utilisés pour réaliser des images de synthèse telles que celles que l’on peut voir dans des films, comme Avatar, ou bien des jeux vidéo, tels que FIFA.
Avantages
✅ Ce sont des systèmes extrêmement précis, avec un risque d’erreur inférieur au millimètre.
✅ Les systèmes optoélectroniques ne présentent pas de problèmes d’occultation ou de dérive.
Limites
❌ Ce sont des systèmes très onéreux – on parle ici de plusieurs centaines de milliers d’euros.
❌ Les systèmes optoélectroniques demandent une grande expertise en post-traitement, ce qui est un usage limité aux laboratoires.
❌ Les capteurs sont à placer sur le corps. Ou bien, l’opérateur peut porter une combinaison tout entière. Cela s’avère gênant pour un opérateur et long à mettre en place.
Aller plus loin
Ces systèmes peuvent néanmoins être utilisés comme référence pour valider des technologies. Ce fût notamment le cas pour notre outil de quantification des risques biomécaniques de TMS, KIMEA. Nous l’avons comparé à cette référence en condition de laboratoire, grâce à cette technologie très précise.
Retrouvez l’article scientifique à télécharger gratuitement ici.
Optique : les caméras 2D et la vision par ordinateur, combo efficace pour mesurer les risques de TMS
La vision par ordinateur permet de repérer des opérateurs dans des images filmées par une caméra et de déterminer les positions de chacune de leurs articulations. On utilise des algorithmes dits de Deep learning qui ont appris, grâce à de très nombreuses données d’exemple, à déduire ces postures à partir d’images.
Avantages
✅ Les caméras 2D sont non invasives pour l’opérateur et non contraignantes pour la production.
✅ Pas de matériel spécifique nécessaire (faible coût d’acquisition) – fonctionne avec un smartphone
Limites
❌ Des problèmes d’occultation sont possibles.
❌ La précision des données est dépendante de l’algorithme et des données d’apprentissage.
Optique : des caméras 3D et de la vision par ordinateur comme méthode de cotation des risques professionnels
Les caméras 3D sont des caméras de profondeur. Elles fournissent une information de profondeur de chaque pixel de l’image. L’algorithme estime la posture directement en 3D grâce à ces données.
Avantages
✅ A l’instar des caméras 2D, elles sont non invasives pour l’opérateur et n’entravent pas la production des entreprises.
✅ Elles sont suffisamment précises pour de l’évaluation ergonomique sur le terrain.
✅ Elles permettent d’obtenir en temps réel des positions en 3D des opérateurs.
Limites
❌ Elles rencontrent aussi des problèmes d’occultation.
❌ Et rebelote pour la précision : elle est également tributaire de l’algorithme et des données d’apprentissage.
Bilan : quel est l’outil de mesure le plus adapté ?
Cet état des lieux nous a permis de tirer plusieurs conclusions. Faisons un rapide tour d’horizon de ce que nous venons de voir ensemble.
Concernant les capteurs
- Les outils de mesure des forces sont des technologies qui permettent d’obtenir les efforts réalisés par les muscles de façon indirecte.
- Cela reste des outils complexes qui sont difficilement utilisables en environnement industriel par des non-biomécaniciens. Cela limite donc leur utilisation aux laboratoires et aux experts qui font des activités de service spécialisées.
- De plus, il n’existe pas de méthode à ce jour qui permette de faire un lien direct entre un effort musculaire et un risque de TMS. De nombreux autres facteurs peuvent entrer en jeu. Il reste néanmoins efficace pour la comparaison d’une situation avec une autre pour constater une augmentation ou une diminution de l’effort musculaire.
Concernant les systèmes basés sur la vision
- Les systèmes optiques n’ont pas ces problèmes puisqu’il suffit de suivre la personne avec une caméra.
- En revanche, les problèmes d’occultation peuvent fausser la capture.
Le point de vue de Moovency sur le bon outil de cotation biomécanique
Capteurs, systèmes basés sur la vision… Pourquoi choisir ?
Cette analyse nous a permis de découvrir les forces et les faiblesses de l’ensemble des outils de mesure biomécanique. Pour nous, le constat est simple. Il faut combiner les capteurs et la vision par ordinateur. Et réunir le meilleur des deux mondes.
C’est pourquoi nous avons pensé et créé KIMEA. Nous avons réinventé la prévention des risques de TMS en proposant une solution de quantification des risques biomécaniques :
- simple d’utilisation pour s’adapter à tous les publics ;
- non-invasive pour les opérateurs et qui ne contraint pas la production ;
- dotée de plusieurs indicateurs de risques de TMS ;
- fiable, aux données scientifiquement prouvées ;
- et qui prend en compte la durée d’exposition des opérateurs dans le calcul du risque de TMS.
Pour le terrain. Pour les entreprises qui se soucient de la sécurité de leurs collaborateurs. Et pour que plus personne ne choisisse entre son travail et sa santé.
Article publié le 8 février 2020. Mis à jour le 15 septembre 2022.
Essayez gratuitement KIMEA Cloud pendant 30 jours !
Faites de KIMEA Cloud votre nouveau partenaire de prévention de la première maladie professionnelle de France : les troubles musculo-squelettiques.